定义LLE算法
GenICam 功能, Scan3dExtractionMethod 提供所有可用的LLE算法。
下图显示了此功能在 GenICam 浏览器中的表现。
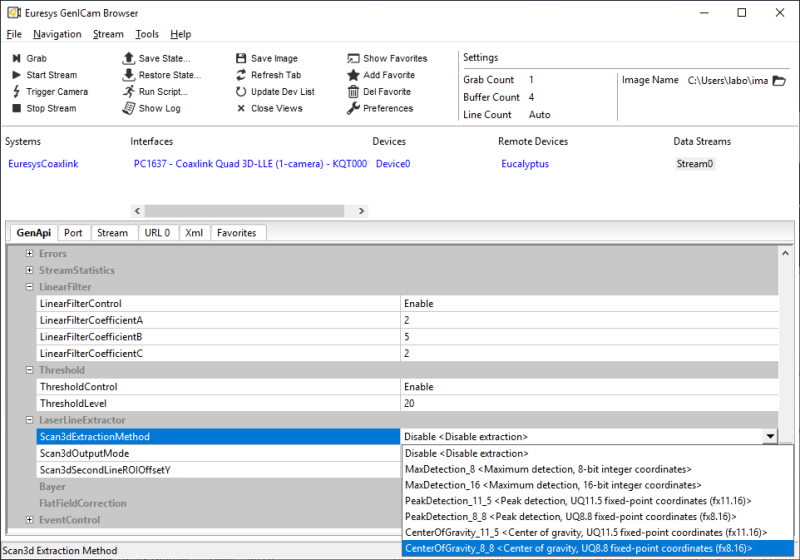
激光线提取选项
可用算法之间的选择,取决于与目标应用程序相关的许多因素。我们在这里强调现有算法之间的主要差异。
LLE-ROI YSize
LLE-ROI(ysize)中有效垂直像素的数量,受可由所选算法的输出格式表示的最大整数值的限制,如下所述:
|
□
|
保留值0x00以指示InvalidDataFlag。 |
|
●
|
MaxDetection_165535像素)。 |
|
□
|
保留值0x0000以指示InvalidDataFlag。 |
|
●
|
PeakDetection_11_5乎2048像素)。 |
|
□
|
保留值0x0000以指示InvalidDataFlag。 |
|
●
|
PeakDetection_8_8乎256像素)。 |
|
□
|
保留值0x0000以指示InvalidDataFlag。 |
|
●
|
CenterOfGravity_11_5048像素)。 |
|
□
|
保留值0x0000以指示InvalidDataFlag。 |
|
●
|
CenterOfGravity_8_856像素)。 |
|
□
|
保留值0x0000以指示InvalidDataFlag。 |
算法分辨率
可用算法的位置分辨率从1像素到1/256像素不等,如下所述:
|
●
|
MaxDetection_8 (8位):1像素。 |
|
●
|
MaxDetection_16 (16位):1像素。 |
|
●
|
PeakDetection_11_5 (UQ11.5):1/32像素。 |
|
●
|
PeakDetection_8_8 (UQ8.8):1/256像素。 |
|
●
|
CenterOfGravity_11_5 (UQ11.5):1/32像素。 |
|
●
|
CenterOfGravity_8_8 (UQ8.8):1/256像素。 |
算法特性
如前所述,LLE算法的选择很大程度上取决于目标应用程序。下面,从应用的角度,对每个LLE算法的主要特征进行描述:
|
●
|
MaxDetection_8etection模块具有8位深度图输出,生成的数据量非常小,3D后处理阶段的计算性能要求更低。 |
|
●
|
MaxDetection_16度图输出,MaxDetection模块的版本可以支持非常大的输入LLE-ROI。 |
|
●
|
PeakDetectionection 模块在亚像素分辨率和最大有效LLE-ROI大小之间进行权衡。PeakDetection 被设计为对强度依赖的偏差不敏感。 |
|
●
|
CenterOfGravityravity 模块,可在亚像素分辨率和最大有效LLE-ROI大小之间的权衡。CenterOfGravity 被设计成对噪声输入和宽线具有鲁棒性。 |
