일반적인 라인 스캔 이미징 시스템
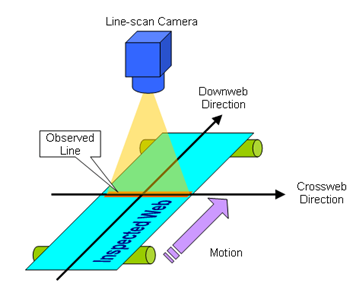
"라인 스캔 이미징"이라는 표현은 대상과 상대적으로 이동하는 1차원 이미징 장치에서 캡처한 연속 이미지 라인의 조합으로 2차원 이미지를 얻는 머신 비전 애플리케이션을 나타냅니다.
라인 스캔 이미징에서:
| ● | 이미징 장치는 종종 라인 스캔 카메라일 수는 있지만 반드시 그런 것은 아닙니다. |
| ● | 검사 대상은 종종 연속 웹이며 고정 된 크기 또는 가변 크기를 갖는 개별 객체일 수도 있습니다. |
| ● | 검사된 웹은 카메라에 상대적으로 움직입니다. 수집 중 모션 속도는 고정되거나 가변적일 수 있습니다. |
| □ | 교차 웹 방향 또는 가로 방향은 카메라가 관측하는 웹 평면상의 축입니다. |
| □ | 하향 웹 방향 또는 축 방향은 카메라에 대해 상대적으로 검사된 웹의 운동 방향입니다. |

스캐닝 영역 정의
스캐닝 영역은 너비가 FOV이고 길이가 스캔 길이와 동일한 웹상의 2차원 영역입니다.
교차 웹 방향(위 그림의 수평 방향)에서 스캐닝 영역은 카메라의 시야(FOV)로 구분됩니다.
하향 웹 방향 (위 그림에서 수직 방향)에서, 스캐닝 영역은 스캔 시작 및 스캔 종료 위치에 의해 구분됩니다. 라인 피치는 웹 속도와 카메라 라인 속도 사이의 비율에 의해 결정됩니다.
라인 스캔 카메라의 시야 - FOV - 는 광학 설정과 센서 기하학적 특성에 의해서만 결정됩니다.
스캔 시작 위치는 첫 번째 수집 라인 앞에 있는 스캔 라인 경계에 해당하는 웹 상의 위치입니다.
스캔 종단 위치는 마지막 수집 라인 다음의 스캔 라인 경계에 해당하는 웹상의 위치입니다.
대부분의 라인 스캔 카메라는 매 카메라 사이클마다 한 줄의 픽셀을 제공합니다. 결과적으로, 여러 카메라 사이클은 객체 이미지를 구축하는 데 필요합니다.
영역 스캔 이미징과는 달리, 라인 스캔 이미징을 사용하면 애플리케이션이 이미지 픽셀 종횡비를 제어할 수 있습니다.
대다수의 경우, 이미징 어플리케이션은 일정하고, 1:1 이미지 픽셀 종횡비를 선호하여 요구합니다.
크로스 웹 피치는 센서 피치 및 광학 배율에 의해 고정되며, 이미지 픽셀 종횡비는 라인 피치 제어를 통해서만 제어할 수 있습니다.
다음 표는 Coaxlink 카드에 적용할 수 있는 일정한 라인 피치를 제공하는 방법을 요약한 것입니다.
| 메서드 이름 | 설명 |
|---|---|
| VCR |
가변 카메라 사이클. 웹 속도는 가변적이며 카메라 순환 속도는 웹 속도에 비례하여 유지됩니다. 프레임 그래버는 카메라가 전달한 모든 연속 라인을 캡처하여 객체 이미지를 만듭니다. |
| CCC |
일정한 카메라 사이클. 카메라는 일정한 사이클 속도로 작동하고 프레임 그래버는 카메라가 전달한 모든 연속 라인을 캡처합니다. |
VCR 방법에는 다음이 필요합니다:
| ● | 웹 속도를 측정하기 위한 모션 인코더. |
| ● | 모션 인코더 이벤트의 실시간 처리로 모션 인코더 이벤트 속도에 비례하는 속도로 카메라 트리거를 구축합니다. |
비례 율은 Divider 도구 또는 Multiplier/Divider 도구를 통해 얻을 수 있습니다:
| ● | Divider 도구는 입력값을 정수값으로 데시 메이트하여 N개의 들어오는 이벤트 중 1개를 전달합니다. |
| ● | Multiplier/Divider 도구를 사용하면 RCR 값의 0.1%보다 우수한 정확도로 0.001에서 1000 사이의 비율 변환 비율 값(RCR)을 허용하여 이미지 픽셀 종횡비를 정밀하게 제어할 수 있습니다. |

크고 작은 물체의 이미지 캡처
CoaXPress 링크를 통한 전송의 경우 (대부분의) 라인 스캔 카메라는 하나의 CoaXPress 이미지 데이터 스트림을 사용합니다.
이미지 데이터의 전달 방법과 관련하여 두 가지 경우를 고려해야 합니다.
| ● | 작은 객체의 경우 객체 이미지 데이터가 단일 GenTL 버퍼로 전달됩니다. |
| ● | 대형 객체의 경우, 객체 이미지 데이터가 여러 GenTL 버퍼로 전달됩니다. |
두 경우 모두 이미지 데이터는 단일 PCIe DMA 채널을 통해 전달되며 전송 지연은 낮습니다: “하나의 이미지 라인”.
GenTL 버퍼 채우기 규칙 - 라인 스캔 카메라
라인 스캔 이미징에서 GenTL 버퍼는 다음 규칙에 따라 채워집니다.
| ● | 스캔의 첫 번째 수집된 라인 데이터는 기본적으로 새 버퍼의 시작 부분에 저장됩니다. 를 로 설정하여 세로 이미지 반전을 사용하면 스캔의 첫 번째 수집된 라인 데이터가 새 버퍼의 마지막 전체 라인 위치에 저장됩니다. |
| ● | 버퍼는 정수 개의 이미지 라인 데이터를 포함합니다. |
| ● | 버퍼의 나머지 공간이 이미지 라인 데이터를 저장하기에 충분하지 않을 때, 획득은 새로운 버퍼로 계속되고, 채워진 버퍼는 처리를 위해 애플리케이션에 이용 가능해집니다. |
| ● | 스캔의 마지막 라인 데이터가 수집되면, 부분적으로 채워질 수 있는 마지막 버퍼가 처리를 위해 애플리케이션에서 사용 가능하게 됩니다. |