Defining the LLE Algorithm
The GenApi feature Scan3dExtractionMethod gives access to all available LLE Algorithms.
The following figure shows how this feature is presented in GenICam Browser (Deprecated).
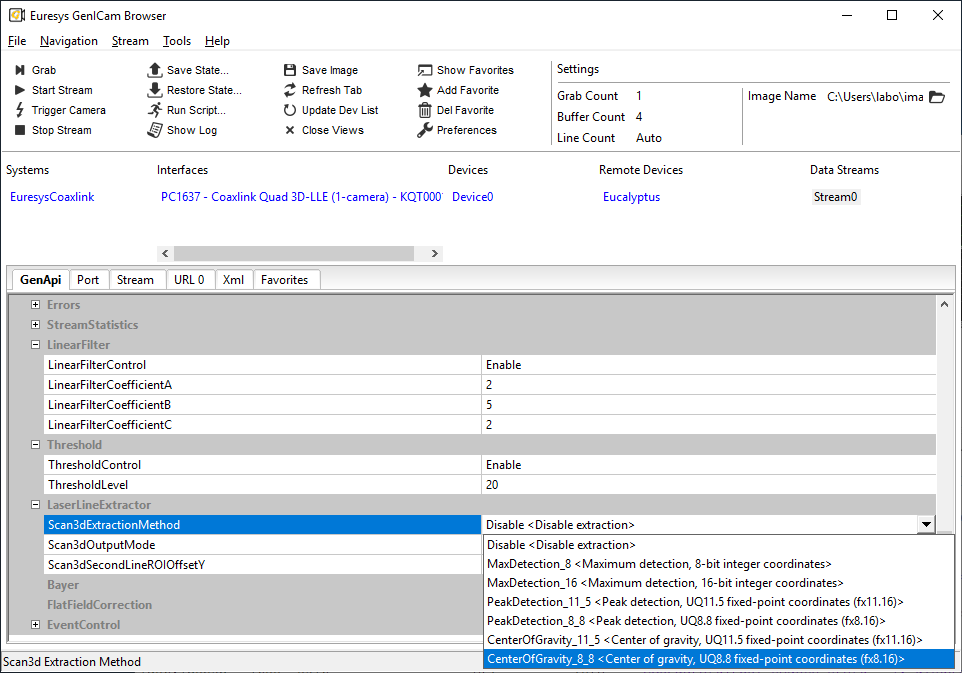
Laser Line Extraction options
The choice between the available algorithms depends on a number of factors related to the target application. We highlight here the main differences among the available algorithms.
LLE-ROI YSize
The number of effective vertical pixels in a LLE-ROI (YSize) is limited by the maximum integer value that can be represented by the output format of the chosen algorithm as described below:
|
●
|
MaxDetection_8 (8-bit): 0xFF (255 pixels). |
|
□
|
The value 0x00 is reserved to indicate an InvalidDataFlag. |
|
●
|
MaxDetection_16 (16-bit): 0xFFFF (65535 pixels). |
|
□
|
The value 0x0000 is reserved to indicate an InvalidDataFlag. |
|
●
|
PeakDetection_11_5 (UQ11.5): 0xFFFF (almost 2048 pixels). |
|
□
|
The value 0x0000 is reserved to indicate anInvalidDataFlag. |
|
●
|
PeakDetection_8_8 (UQ8.8): 0xFFFF (almost 256 pixels). |
|
□
|
The value 0x0000 is reserved to indicate anInvalidDataFlag. |
|
●
|
CenterOfGravity_11_5 (UQ11.5): 0xFFFF (almost 2048 pixels). |
|
□
|
The value 0x0000 is reserved to indicate an InvalidDataFlag. |
|
●
|
CenterOfGravity_8_8 (UQ8.8): 0xFFFF (almost 256 pixels). |
|
□
|
The value 0x0000 is reserved to indicate an InvalidDataFlag. |
Algorithm Resolution
The position resolution of the available algorithms varies from 1 pixel up to 1/256 pixel as described below:
|
●
|
MaxDetection_8 (8-bit): 1 pixel. |
|
●
|
MaxDetection_16 (16-bit): 1 pixel. |
|
●
|
PeakDetection_11_5 (UQ11.5): 1/32 pixel. |
|
●
|
PeakDetection_8_8 (UQ8.8): 1/256 pixel. |
|
●
|
CenterOfGravity_11_5 (UQ11.5): 1/32 pixel. |
|
●
|
CenterOfGravity_8_8 (UQ8.8): 1/256 pixel. |
Algorithm Specificities
As mentioned previously, the choice of an LLE algorithm strongly depends on the target application. Following, a description of the main features of each LLE algorithm from the application point of view:
|
●
|
MaxDetection_8 (8-bit): This version of the MaxDetection module with an 8-bit depth map output generates a very small amount of data which requires less computing performance from the 3D post-processing stage. |
|
●
|
MaxDetection_16 (16-bit): With its 16-bit integer depth map output, the version of the MaxDetection module can support very large LLE-ROI. |
|
●
|
PeakDetection: The two versions of the PeakDetection module offer a trade-off between sub-pixel resolution and maximum effective LLE-ROI size. The PeakDetection was designed to be insensitive to intensity-dependent biases. |
|
●
|
CenterOfGravity: The two versions of the CenterOfGravity module also offer a trade-off between sub-pixel resolution and maximum effective LLE-ROI size. The CenterOfGravity was designed to be robust to noisy inputs and wide lines. |