좌표 관리
Z맵의 좌표계
Z맵에는 여러 좌표계가 있습니다.
|
□
|
실제 공간시스템은 Z맵이 생성된 원래의 미터 공간입니다. 포인트 클라우드와 메쉬는 실제 좌표계로 표현됩니다. |
|
□
|
Z맵 공간은 실제 공간의 강체 변환에 의해 정의됩니다. 이 변환과 연결된 기준은 Z맵의 왼쪽 아래 모서리에 연결됩니다. |
|
□
|
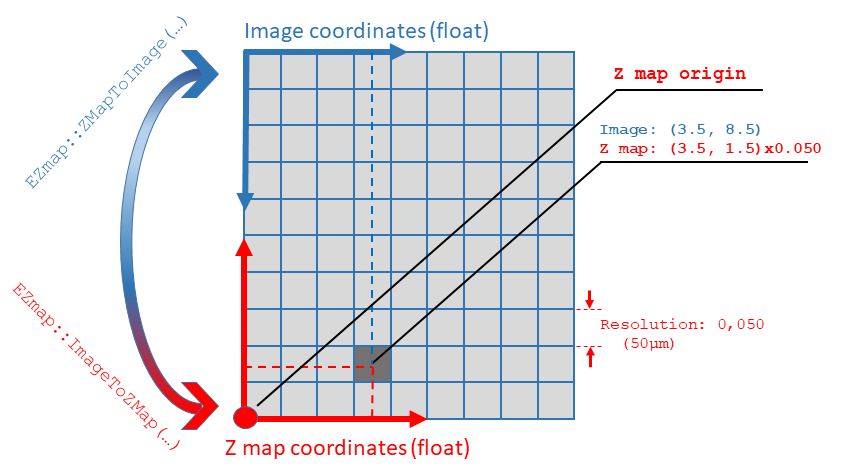
이미지 공간은 Z맵의 이미지 표현에 첨부된 시스템입니다. 원점은 Z맵의 왼쪽 위 모서리이며 단위 길이는 X축과 Y축을 따라 한 픽셀입니다. |
다음 사이의 변환:
|
□
|
이미지 공간과 Z맵 공간은 스케일 인자를 포함합니다. |
|
□
|
Z맵 공간 과 월드 공간은 견고한 변환입니다. |
EZMap
The EZMap object exposes a set of methods to convert coordinates between world, ZMap and image spaces:
|
□
|
ImageToZMap converts a 2D position in the image to ZMap coordinates. |
|
□
|
ZMapToImage is the reciprocal operation and converts a ZMap position to an image position. |
|
□
|
ZMapToWorld is a method to transform positions from the 3D ZMap space to the 3D world space. 월드 공간은 원래의 포인트 클라우드 또는 메쉬 공간입니다. |
|
□
|
WorldToZMap is the reciprocal operation, converting from world space to ZMap. |
|
□
|
ImageToWorld and WorldToImage combine the functions above to transform directly from image space to world space (or the other way). |
이 메소드는 다양한 좌표계 간에만 기하학적 변환을 수행하고 실제 Z맵 그레이스케일 값에는 액세스하지 않습니다.
픽셀 값에 액세스하는 함수는 다음과 같습니다.
|
□
|
GetWorldPositionFromPixelPosition is a method transforming the actual pixel value at integer position (u, v) to the original world space. 이 메소드는 ZMap 내부 표현을 쿼리하여 픽셀값 w를 얻고 픽셀 공간 (u, v, w) 좌표를 월드 공간 위치로 변환합니다. |
|
□
|
GetWorldPositionFromMapPosition is a method to get a 3D world position corresponding to a ZMap 2D coordinate. The world position is in the original point cloud space. If the 2D coordinate is undefined, an exception is thrown. |