Sample Programs
Image Processing ↗
|
示例 |
The sample program demonstrates how to: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|

|
✓ | ✓ | ✓ | ✓ | ||||||||||||||
|
|
|
✓ | |||||||||||||||||
|
|
— | ✓ | ✓ | ✓ | |||||||||||||||
|
|

|
✓ | ✓ | ✓ | |||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
✓ | |||||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|
— | ✓ |
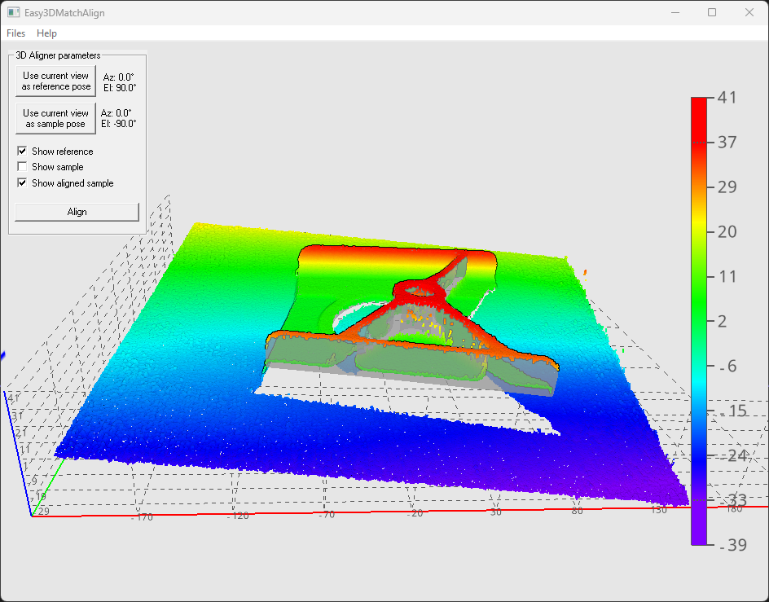
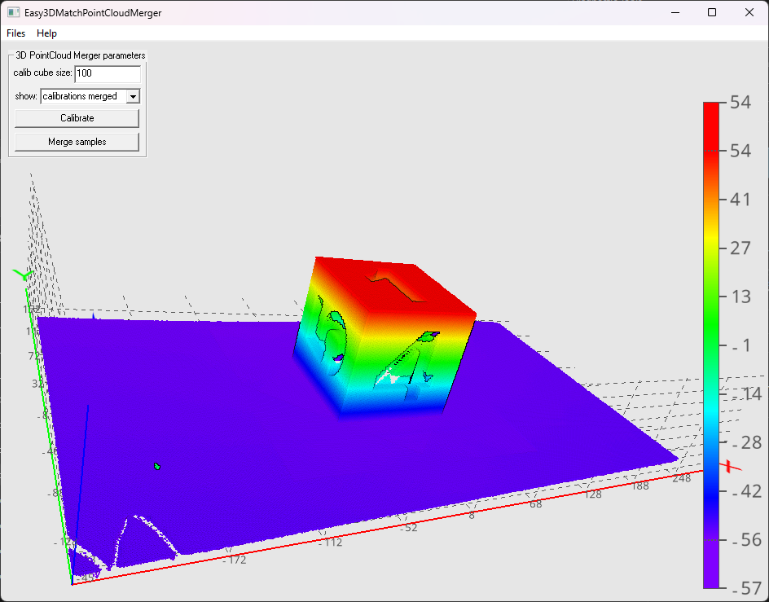
3D Processing ↗
|
示例 |
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|
✓ | ✓ | ✓ | |||||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|
|
✓ | ✓ | ✓ | |||||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|

|
✓ | ✓ | ✓ | |||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|
|
✓ | ✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ |
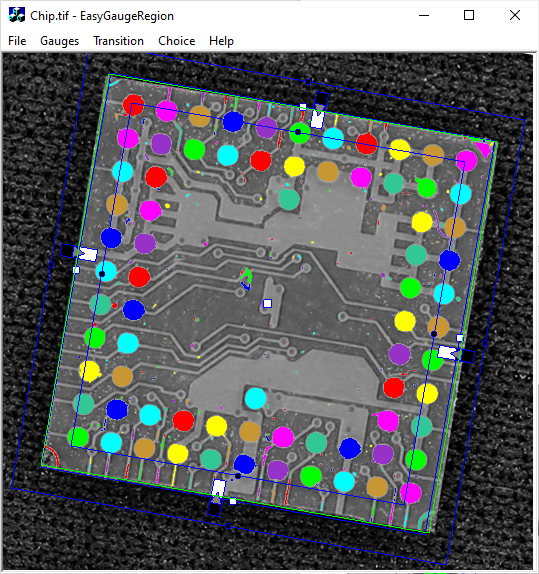
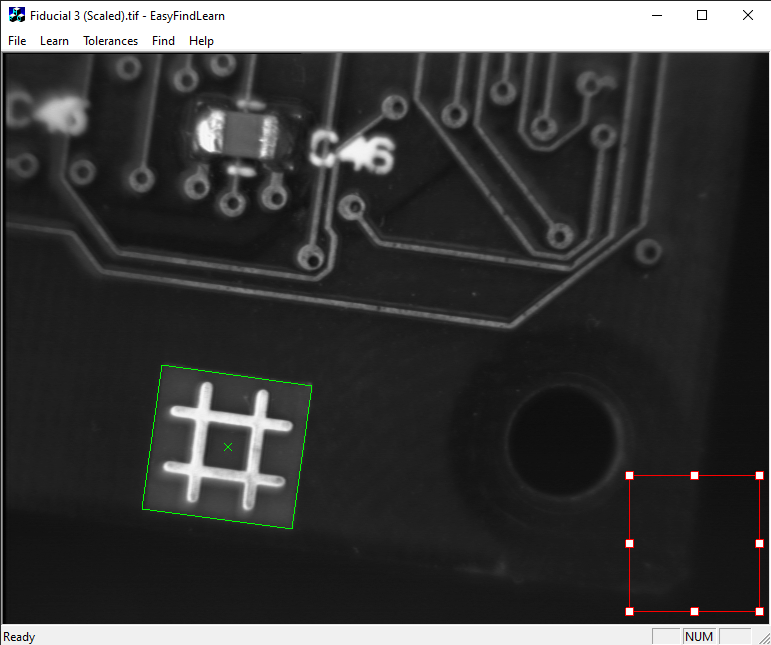
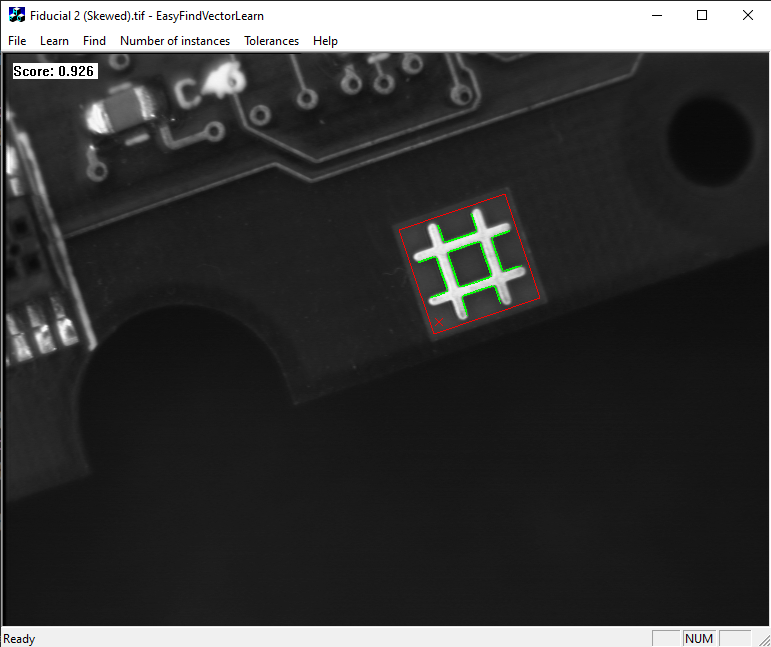
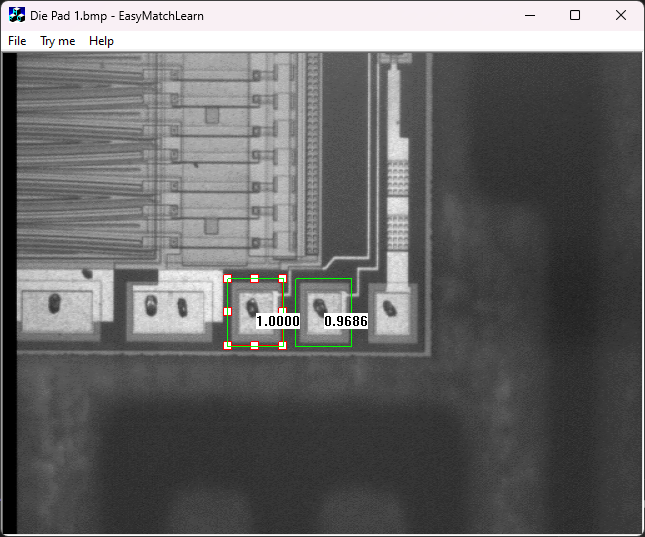
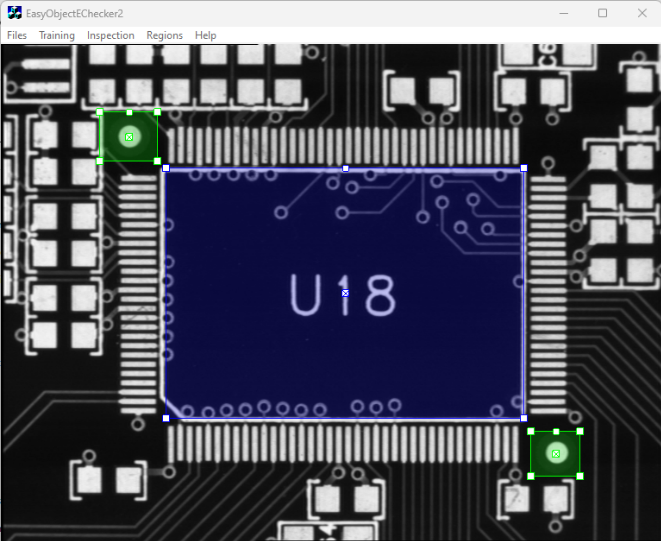
Matching and Measurement ↗
|
示例 |
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|

|
✓ | ✓ | ✓ | ✓ | ||||||||||||||||||||
|
|
|
✓ | |||||||||||||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||||||||
|
|
|
✓ | ✓ | ✓ | |||||||||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||||||||
|
|
|
✓ | ✓ | ||||||||||||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | ✓ |
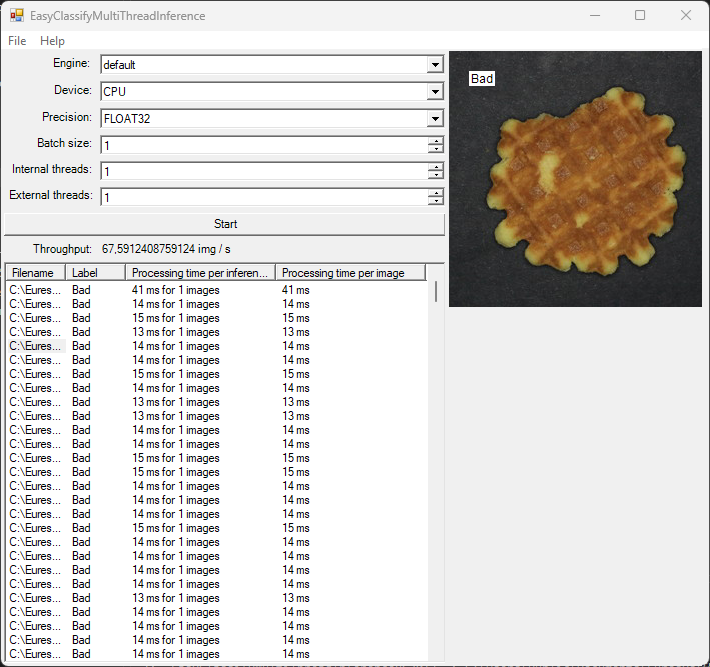
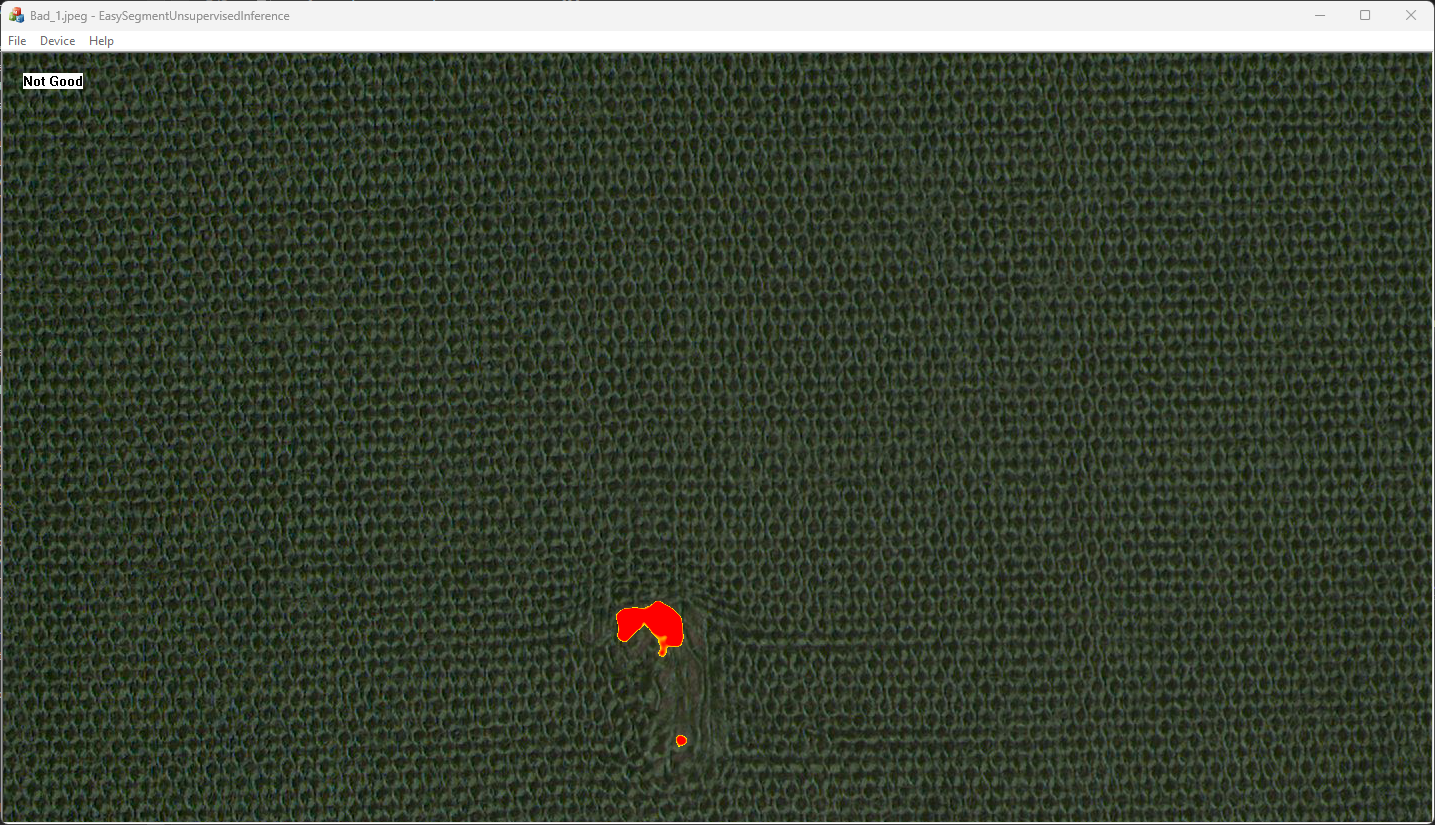
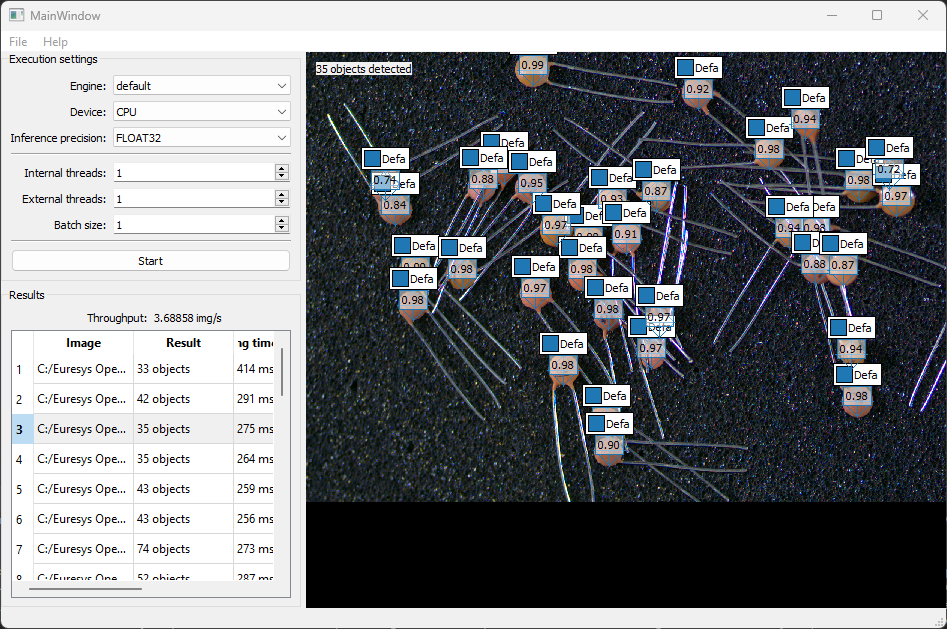
Deep Learning Inspection ↗
|
示例 |
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
— | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | |||||||||||
|
|
|
✓ | ||||||||||||||
|
|
— | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | |||||||||||
|
|
— | ✓ | ||||||||||||||
|
|
— | ✓ | ✓ | |||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | |||||||||||
|
|
— | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | |||||||||||
|
|
|
✓ |
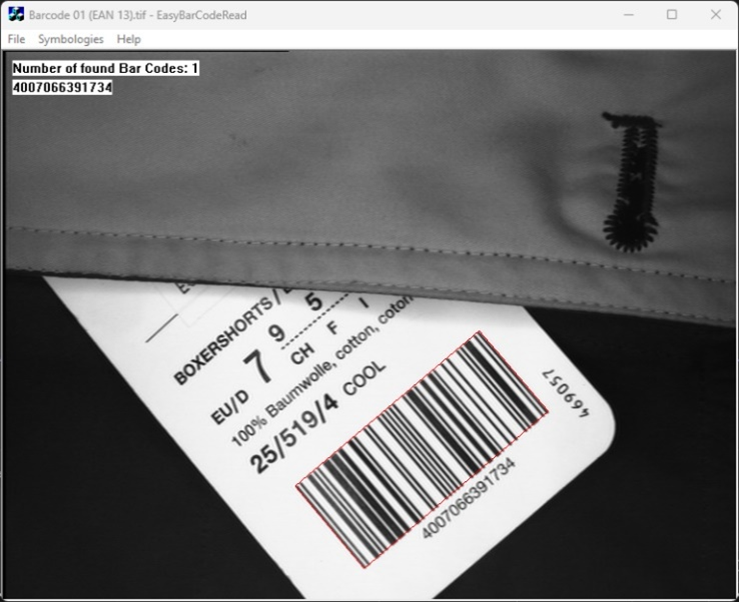
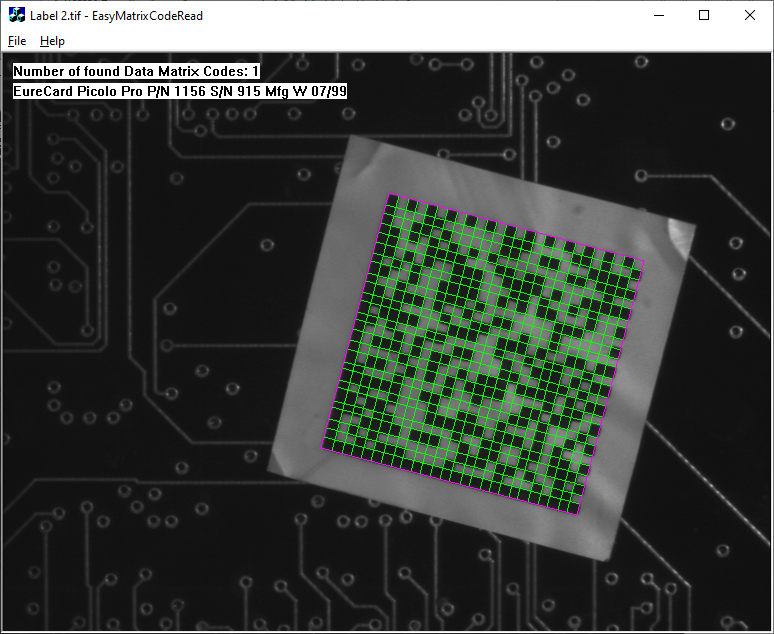
Text and Code Reading ↗
|
示例 |
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|

|
✓ | ✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ||||||||||||||||
|
|
|
✓ | ✓ | ✓ | ✓ | ||||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
|
|

|
✓ | |||||||||||||||||
|
|

|
✓ | ✓ | ✓ | ✓ | ✓ | |||||||||||||
|
|

|
✓ | ✓ | ✓ | |||||||||||||||
|
|
✓ | ✓ |
Applicative Processing Tools ↗
|
示例 |
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
Python |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|

|
✓ |
Python Specific ↗
|
示例 |
The sample program demonstrates: |
Image | Python | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
eGrabber |
|
|

|
✓ | ||||||||||||
|
OpenCV camera |
|
|
|
✓ | ||||||||||||
|
OpenGL |
|
|

|
✓ | ||||||||||||
|
Qt |
|
|

|
✓ | ||||||||||||
|
|

|
✓ | |||||||||||||
|
VimbaX |
|
|
|
✓ | ||||||||||||
|
Base Web |
|
|

|
✓ | ||||||||||||
|
Basic Tkinter |
|
|
|
✓ | ||||||||||||