E3DTransformMatrix::GetAzimuthElevationAngles
Gets the azimuth and elevation angles for the Z axis of the coordinate system represented by the transformation matrix.
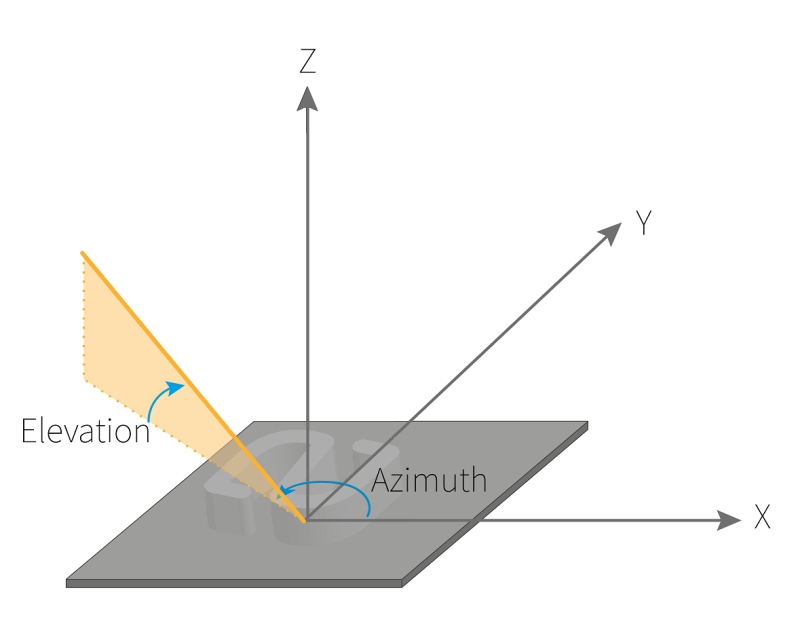
Azimuth angle is oriented trigonometrically around the z axis. The x axis corresponds to an azimuth of 0 degrees. Elevation angle represents the height of the normal w.r.t. the z = 0 plane.
The E3DTransformMatrix must be rigid (translation and rotation only).
Namespace: Euresys::Open_eVision::Easy3D
[C++]
EAzimuthElevationAngles GetAzimuthElevationAngles() const
Remarks
E3DTransformMatrix.AzimuthElevationAngles
Gets the azimuth and elevation angles for the Z axis of the coordinate system represented by the transformation matrix.
Azimuth angle is oriented trigonometrically around the z axis. The x axis corresponds to an azimuth of 0 degrees. Elevation angle represents the height of the normal w.r.t. the z = 0 plane.
The E3DTransformMatrix must be rigid (translation and rotation only).
Namespace: Euresys.Open_eVision.Easy3D
Remarks
E3DTransformMatrix.AzimuthElevationAngles
Gets the azimuth and elevation angles for the Z axis of the coordinate system represented by the transformation matrix.
Azimuth angle is oriented trigonometrically around the z axis. The x axis corresponds to an azimuth of 0 degrees. Elevation angle represents the height of the normal w.r.t. the z = 0 plane.
The E3DTransformMatrix must be rigid (translation and rotation only).
Module: open_evision.Easy3D
Remarks