照度差ステレオおよびプロセス
はじめに
照度差ステレオはオブジェクト表面におけるノーマルを推定するために使用されるテクニックです。
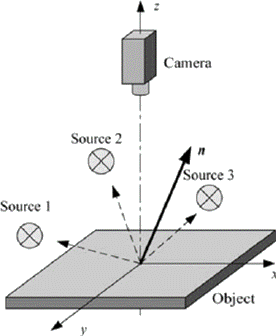
照度差ステレオ設定
ソース:
| ● | 異なる既知の照明方向のもと撮影された同一オブジェクトの画像が少なくとも3枚必要になります。 |
入力:異なる照明方向の画像
| ● | 反射された光の断片を持つ画像(アルベドと呼ばれる)と各ピクセル表面のノーマルを生成します。 |

出力:アルベド - ノーマル
| ● | ノーマルは勾配と曲率を計算してバンプやホールを見やすくするために処理されます。 |



出力:勾配X - 勾配Y - ガウス曲率 - 平均曲率
プロセス
You can use the object Easy3D::PhotometricStereoImager in a 4-step process:
| 1. | スフィアまたは事前定義されたアングルから設定をキャリブレーションします(セットアップごとに1回)。 |
| 2. | 照度差ステレオ計算をオブジェクト画像に対して実行します。 |
| 3. | 結果を取得します。 |
| 4. | 結果に対してOpen eVisionツールを使用し、適用します。 |
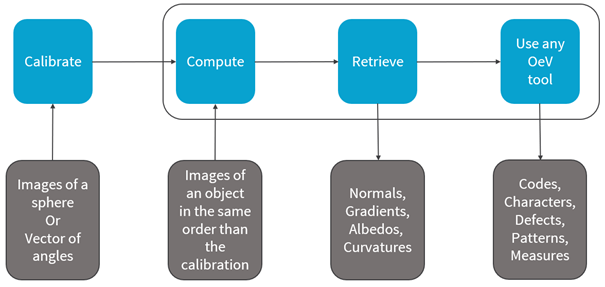
照度差ステレオプロセス
リソース
| ● | ここの例では、照度差ステレオをOpen eVision3Dツールと実行する方法について説明されています。 |
| ● | サンプルアプリケーションはソースコードと共に配布されます。You can find it in …\Sample Programs\MsVc samples\3D Processing\Easy3DPhotometricStereo. |
| ● | 本ドキュメント及びサンプルアプリケーションは以下のリソースに基づいています。 |
| □ | Open eVision2.15 |
| □ | Microsoft Visual Studio 2017 |
照度差ステレオツールを使用するには、Easy3Dのライセンスが必要になります。