
레이저 선 추출
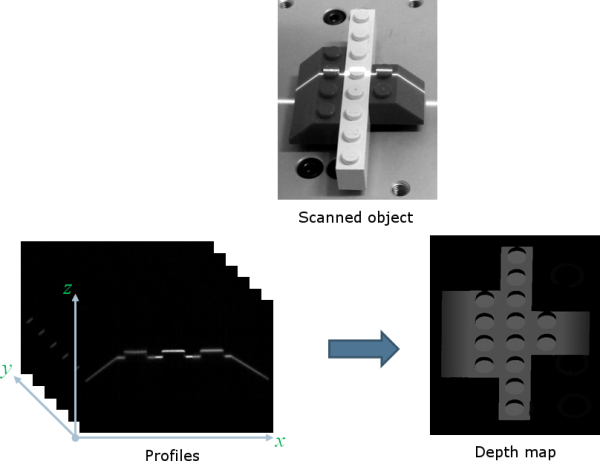
레이저 선 추출(LLE) 알고리즘은 카메라 센서에 의해 캡쳐된 물체의 일련의 프로파일로부터 깊이 맵을 생성하는 데 필요합니다.
LLE 알고리즘의 목적은 사용자 정의 관심 영역 (ROI) 내에서 센서 프레임의 모든 열에서 수직 프로파일을 따라 라인 위치를 측정하는 것입니다.
객체 위치의 모든 단계에서 감지는 프레임의 각 열을 개별적으로 분석하고 그레이 값으로 저장된 출력 위치 행을 생성합니다.
아래 그림은 깊이 맵 생성을 보여줍니다.
ELaserLineExtractor 클래스는Open eVision에서 레이저 선 추출 기능을 제공합니다. 그것은 레이저 라인을 추출하기 위해 몇 가지 알고리즘을 구현합니다 :
| □ | 최대 감지는 최대 강도의 픽셀 위치를 반환합니다. 가장 빠른 방법이지만 서브 픽셀 정밀도는 지원하지 않습니다. |
| □ | 피크 검출 방식은 국소 최대값을 검출합니다. 여러 개의 최대값이 검출되면 가장 놓은 강도를 가진 값이 반환됩니다. 위치는 서브 픽셀 정밀도로 반환됩니다. |
| □ | 중심선 알고리즘은 레이저 선이 여러 픽셀에 걸쳐 있을 때 적합합니다. 위치는 서브 픽셀 정밀도로 반환됩니다. |
낮은 강도의 픽셀을 제외하도록 임계값을 설정할 수도 있습니다.
레이저 선 추출 알고리즘에 의해 반환된 선 위치는 관심 영역 하단과 관련이 있습니다. 그래서 깊이 맵의 값은 0(ROI의 아래쪽)에서 ROI 높이까지의 범위에 있습니다.

저역 통과 선형 필터
선택적으로 이미지의 노이즈 및 고주파를 줄이기 위해 선 추출 앞에 로우 패스 선형 필터를 적용할 수 있습니다.
저역 통과 필터는 1 x 3 슬라이딩 윈도우에 컨볼루션 연산자를 적용합니다. 컨볼루션 커널 (A, B, C)의 세 요소는 구성 가능하며 양의 정수를 허용합니다. 아래 그림은 주어진 ROI 내에서 컨볼루션 커널 요소의 위치를 보여줍니다.

ELaserLineExtractor::SetEnableSmoothing(true/false) 메서드로 레이저 선 추출 방법에 대해 저역 통과 필터를 활성화할 수 있습니다. 매개 변수 A, B, C는 다음과 같이 설정됩니다 ELaserLineExtractor::SetSmoothingParameters(A, B, C).