
The Laser Line 3D Acquisition Pipeline
The 3D acquisition pipeline starts with the acquisition of a laser line profile and ends up with the point cloud, mesh or ZMap.
The source material for 3D processing is the depth map, coming from a Coaxlink Quad 3D-LLE or generated from a list of images. Two types of depth map are available, one for each different pixel coding scheme (8- or 16-bit).
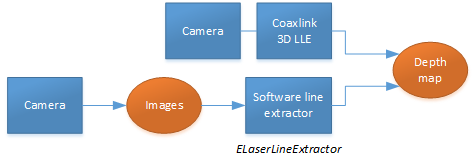
The generation of a depth map, from a hardware or a software source
Some processing methods can use the depth map directly, but most measurement and matching processes need metric, distortion-free representations. Calibration of the laser triangulation setup is therefore required. Calibration is used to turn the depth map into a point cloud or mesh expressed in a metric space that we call “world space”.
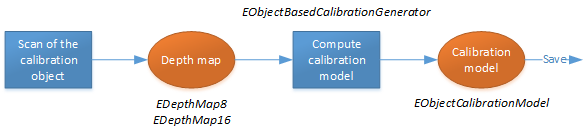
The generation of an object based calibration model, from a scan of the reference object
A point cloud is a list of 3D points, expressed in a world space coordinate system. The point cloud can be projected on a plane, producing a ZMap, which is a convenient and effective representation for 2D processing with a metric scale.
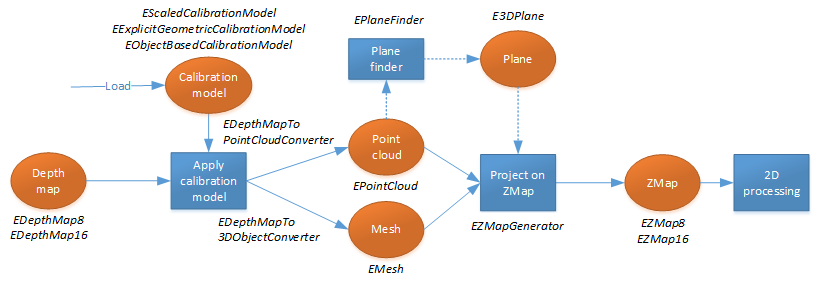
The workflow from the depth map to the ZMap
The following sections describe the classes and methods useful for a 3D workflow. The Measuring a Remote Controller goes through this processing pipeline.