Image objects
The Open eVision image objects contain image data that represents rectangular images.
Each image object has a data buffer, accessible via a pointer, where pixel values are stored contiguously, row by row.
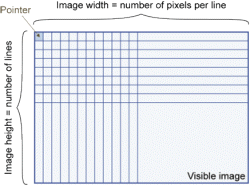
Image main parameters
The rectangular array of pixels of an Open eVision image object is characterized by the EBaseROI parameters:
| ● | The Width is the number of pixels per row of the image. |
| ● | The Height is the number of rows of the image. |
| ● | The Size contains both the Width and the Height of the image. |
| ● | The BitsPerPixel is the number of storage bits per pixel. |
| ● | The RowPitch is the number of bytes between two vertically adjacent pixels. It is always bigger than Width × (BitsPerPixel / 8). |
- The maximum size for the row pitch and the height are 2,147,483,647 (231-1).
- The maximum size for the width is the maximum size for the row pitch divided by the number of storage bytes per pixel (8 × BitsPerPixel).
| ● | The Plane contains the number of color components. |
| □ | For gray-level images: Plane = 1 |
| □ | For color images: Plane = 3 |
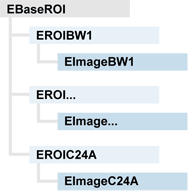
Classes
The image and ROI classes derive from the abstract class EBaseROI and inherit all its properties.
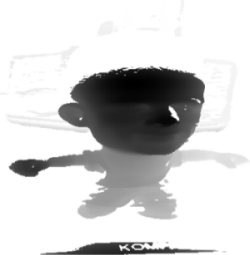
Depth maps
A depth map represents a 3D object using a 2D grayscale image in which each pixel represents a 3D point.
| □ | The pixel coordinates are the X and Y coordinates of the point. |
| □ | The gray value of the pixel is a representation of the Z coordinate of the point. |
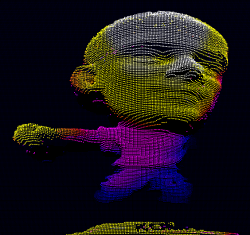
Point clouds
A point cloud is an unstructured set of 3D points representing discrete positions on the surface of an object.
The point clouds are produced by various 3D scanning techniques, such as laser triangulation, time of flight or structured lighting.
| 2 | For details, see, for example, en.wikipedia.org/wiki/Point_cloud. |