3D Processing
|
Sample |
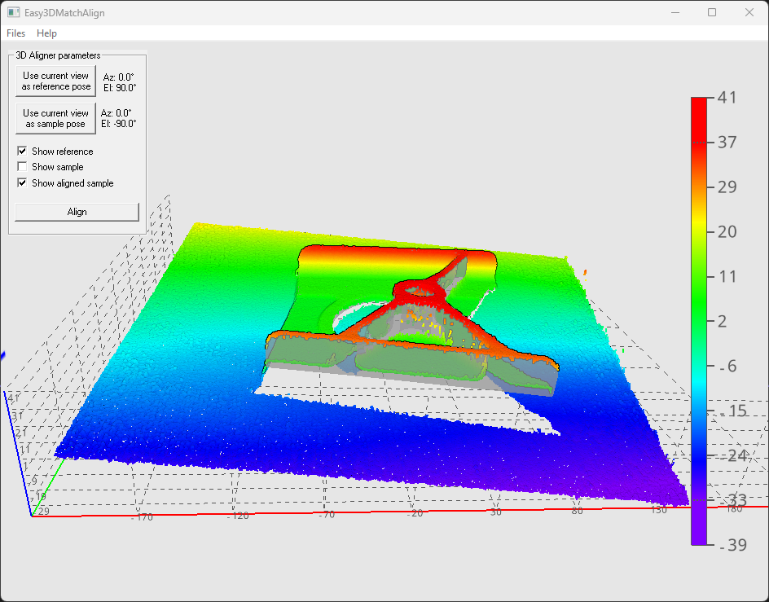
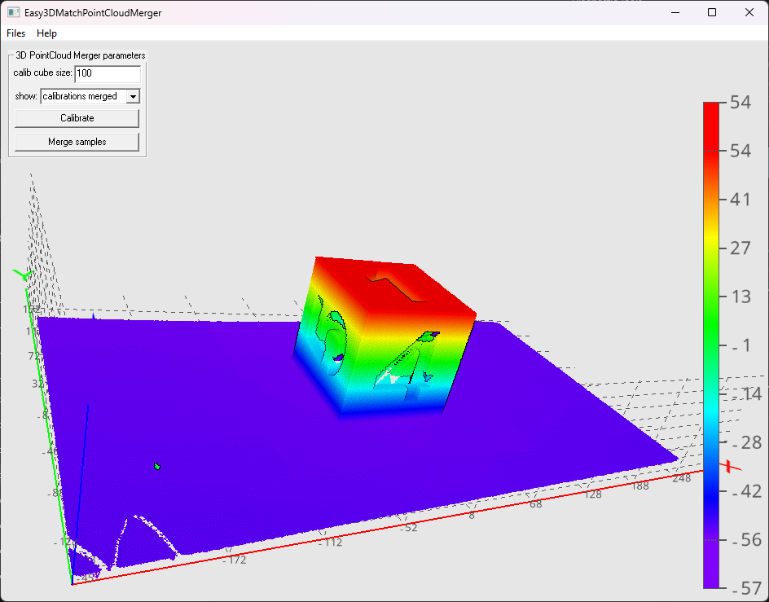
The sample program demonstrates: |
Image |
C++ |
C# |
Qt |
CMake |
Vb |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|
✓ | ✓ | ✓ | ||||||||||||||
|
|
|
✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | |||||||||||||||
|
|
|
✓ | ||||||||||||||||
|
|
|
✓ | ✓ | ✓ | ||||||||||||||
|
|
|
✓ | ||||||||||||||||
|
|
|
✓ | ||||||||||||||||
|
|
|
✓ | ||||||||||||||||
|
|
|
✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | ✓ | ||||||||||||||
|
|
|
✓ | ✓ | |||||||||||||||
|
|
|
✓ | ✓ | ✓ | ||||||||||||||
|
|
|
✓ | ✓ |